C.1405
Front wheel set-up
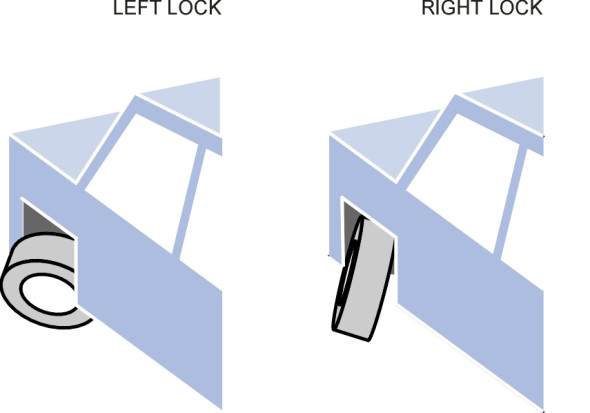
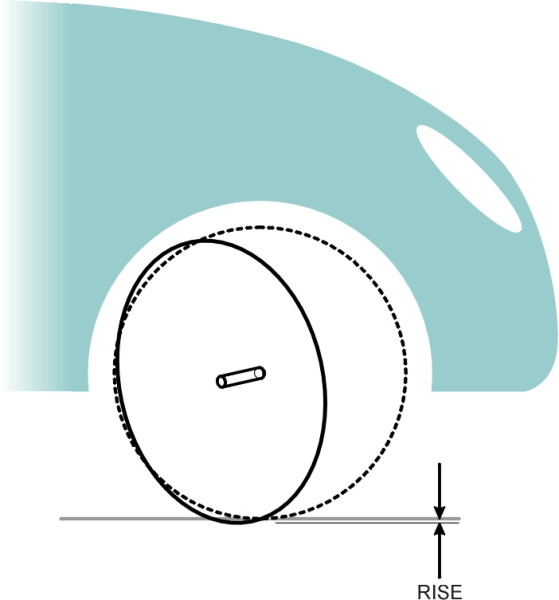
The front wheels of a car spend most of their lives hidden under the wheel arches. But if you look carefully, you will notice there is something odd about the geometry when the driver steers round a sharp curve and the wheels are at full lock (figure 1). The pivot axis around which each front wheel swivels, is not, as you might imagine, vertical. There are several reasons for this, some of which have their roots in the nineteenth century when early car engineers looked to the horse-drawn carriage as their model. While trying to adapt the leaf spring suspension to the needs of the motor car, they found that a modest change in the alignment of the pivot axis could greatly improve the vehicle’s behaviour, and an inclined pivot axis remains standard practice today. In fact, it is tilted both fore-and-aft as well as from side-to-side, and there are several other ways in which the front-wheel set-up differs from what you might expect.
Figure 1
Castor
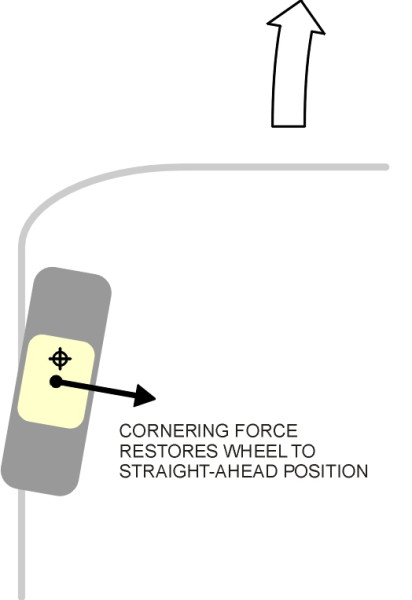
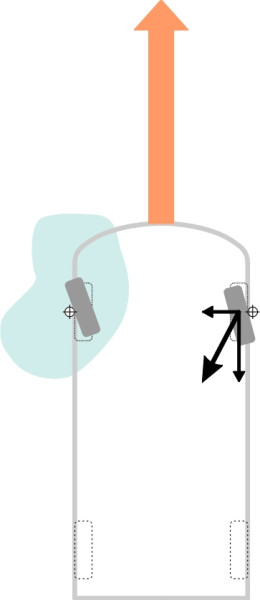
Let’s begin with castor. The aim is to have the wheel trail behind its pivot axis like a castor on a supermarket trolley (figure 2). It is possible to run a car with zero trail or even a small negative trail with the wheel ahead of the pivot axis. But this arrangement fails to meet the first requirement of any steering system, that if the driver lets go of the handwheel, the steering should return automatically to the central position rather than causing the vehicle to swerve unpredictably to one side. In fact, if the wheel is too far ahead, any deviation from the straight ahead position tends to increase of its own accord, and like the castor of a supermarket trolley, the wheel will try to flip round 180\(^{\circ}\) and tear itself off the car. By contrast, with positive trail the car is directionally stable even if the driver releases the handwheel. It does this because any steering movement will generate a cornering force on the tyre contact patch that in turn restores the steering towards its central position (figure 3).
Figure 2

Figure 3
Mechanical trail
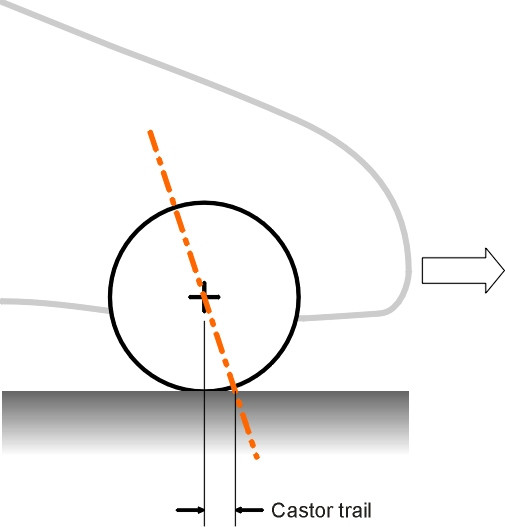
On a supermarket trolley, the pivot axis is vertical, so the two main forces on the suspension - the weight of the body pressing down from above, and the reaction from the road surface pressing up on the wheel from below - are not aligned (figure 4). Together they exert a couple on the suspension, and if this configuration were used on a truck with a beam axle, for example, they would twist the axle on its mountings. The solution is to rake the pivot axis astern like the mast of a sailing ship, at an angle of several degrees from the vertical so it passes down through the wheel bearing to meet the road surface a short distance ahead of the centre of contact of the tyre with the road (figure 5). This castor angle, as it is usually called, provides mechanical trail without putting an eccentric load on the suspension.
Figure 4
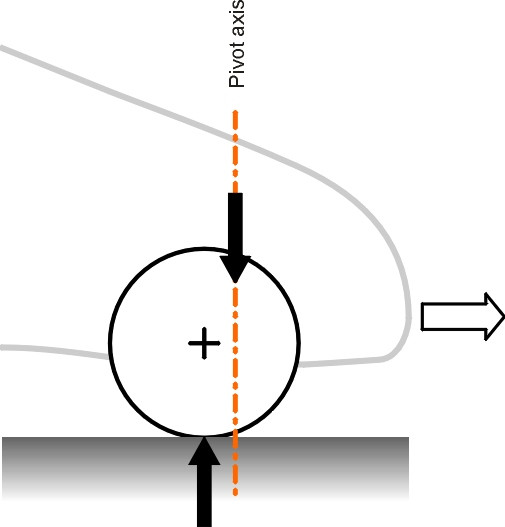
Figure 5
The angle of rake has increased over time. For many years, the upper limit was around 5\(^\circ{}\), but by the 1990’s, it grew to 8\(^\circ{}\) for rear-wheel drive cars [11]. The reason was nothing to do with stability. With a high castor angle, when the driver enters a curve the front wheel is presented to the road not vertically but leaning inwards like the front wheel of a motorcycle, which reduces the slip angle and makes the steering more precise. There is, however, a drawback: the greater the rake, the greater the mechanical trail, and the greater the self-aligning torque. Hence the driver must work harder to turn the handwheel when steering round a curve – the steering becomes ‘heavy’. The solution is to shift the stub axle slightly ahead of the pivot axis. In this way, the designer can raise the angle to more than 10\(^\circ{}\) [10].
Negative trail
Not all vehicles are configured with the pivot axis raked astern [1]. Indeed, on some front-wheel drive cars, the axis leans in the opposite direction, i.e., it is raked forward. Why? Because a car with front-wheel drive (FWD) doesn’t drag its wheels along, but rather, the wheels drag the car, and logically, a stable FWD configuration requires negative trail. Unfortunately, when the driver reduces power, for example when braking or coasting downhill, this no longer applies. There is no fixed angle that can deal with both the power-on and power-off conditions.
Pneumatic trail
In practice this doesn’t matter because the effect of castor angle is swamped by another kind of ‘trail’ that occurs with modern tyres. It arises from the distribution of stresses within the contact patch. There two sorts of stress distribution: (a) normal stress, that is to say, pressure at right angles to the road surface, and (b) shear stress, which acts within the plane of contact between the tyre tread and road surface. The normal pressure can be pictured as acting at a point. So can the shear stress. But the two points don’t coincide, and neither point lies at the centre of the contact patch. Hysteresis in the tyre walls causes the centre of normal pressure to move forward of the axle centreline (see Section G1619). By contrast, on a bend, the centre of shear stress moves aft: lateral distortion of the tyre tread is zero at the front of the contact patch and grows to a maximum at the rear. Hence as shown in figure 6, the cornering force is concentrated at a point roughly three-quarters of the way along the contact patch [6] [8].
Figure 6

Feedback from self-aligning torque
As with mechanical trail, pneumatic trail exerts a torque on the steering that tends to make it return to the central position. The faster the car is travelling round a curve, the greater the restoring force, and this provides useful feedback for the driver. If the driver ignores the feedback and continues to turn the handwheel, eventually the tyre tread will begin to slide across the road surface. Sliding begins at the rear of the contact patch and moves progressively forward as the demand for grip rises. In this critical regime, although the lateral force grows throughout, the pneumatic trail decreases and the two compensate, so that the self-aligning torque reaches a plateau [6]. When the peak cornering force is reached, the self-aligning torque falls to zero and the handwheel becomes slack in the driver’s hands as the tyre skids [5].
Offset
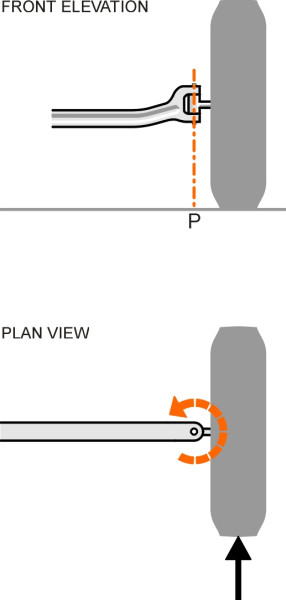
Now let us focus, say, on the left-hand front wheel, viewed from the front. Ideally, the pivot axis should pass through the centre of the contact patch. Otherwise, as shown in figure 7, whenever the wheel meets an obstruction or passes over a bump, it will be dragged rearward relative to the vehicle, twisting the wheel and axle assembly out of line and imparting a ‘kick’ to the steering. If you have ever ridden a home-made roller-coaster with its front axle pivoted at its centre you will know how disconcerting this can be.
Figure 7
Competition for space in the wheel arch
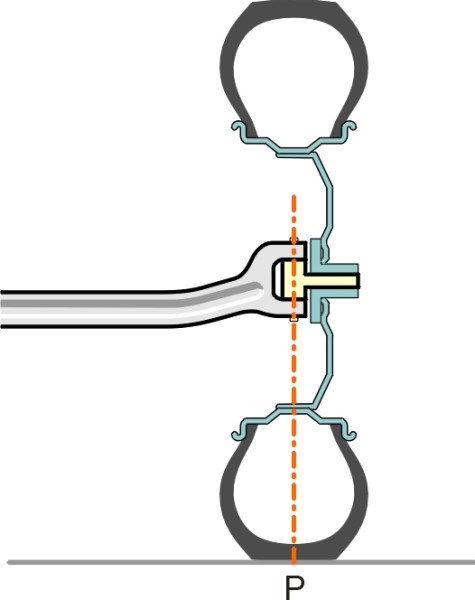
The obvious solution is to hollow out the wheel dish and re-locate the suspension attachments inside so that the pivot axis projects vertically downwards through the centre of the contact patch (figure 8). But it’s not just the suspension attachments that have to fit into this space. There is also the wheel bearing, stub axle, brake drum or disc, and steering lever arm. Additionally, a front-wheel drive car needs a constant velocity joint that connects the hub to the engine drive shaft. Finally, there must be enough room inside the wheel dish for the whole assembly to flex as the springs jounce and rebound over bumps in the road, and there must be enough room for the wheel to swivel, without any of the components fouling one another or fouling the bodywork. In practice, it is easier (a) to tilt the wheel, or (b) incline the pivot axis, or (c) both.
Figure 8
Positive camber
Two-way roads are usually ‘cambered’, i.e, the cross-section is raised in the centre to promote drainage. Accordingly, it is sometimes said, the front wheels of early cars were made to lean outwards so they would be perpendicular to the road surface [4] [7]. This arrangement was known as positive camber. A more likely reason was that the spoked wheels and drum brakes of early cars took up a great deal of room so it was necessary both to camber the wheel and incline the pivot axis in order to bring the point of intersection with the road surface closer to the middle of the contact patch. The result is shown in figure 9. Nowadays it looks rather quaint, and in fact it interferes with good road-holding because positive camber reduces cornering stiffness. If a wheel leans outwards on a curve, the tyre slip angle tends to increase and worse, part of the tread may lift clear of the road surface and lose grip (see Section C1717). So the scope for camber is limited, especially on modern cars with wide tyres.
Figure 9
Conical rolling and camber thrust
Another side-effect of camber is that it makes the wheel steer in the direction that it is leaning. Hence with positive camber on a flat road surface, the two front wheels tug in opposite directions as they attempt to roll towards opposite sides of the road. The lateral thrust arises from differential longitudinal forces across the width of the contact patch, different parts of which are effectively rolling at different speeds [9]. Or if you prefer, the tyre behaves like a cone rolling around its apex (see Figure 13 in Section C1114). This is not necessarily a drawback. A small amount of camber – either positive or negative - puts a load on the links that connect the front wheels with the steering assembly. This takes up any slackness arising from loose or worn joints, for example, so that the steering does not meander aimlessly from side to side [7]. Nevertheless, the trend over the last few decades has towards smaller camber angles rather than larger ones.
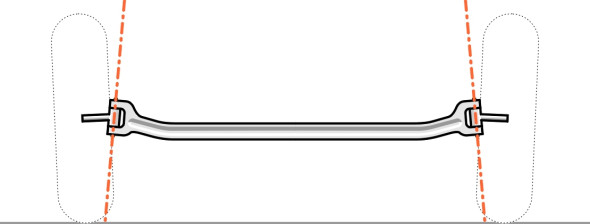
Pivot axis inclination
When viewed from the front of the vehicle, the pivot axis of a modern steering mechanism leans inward at an angle of up to 15\(^\circ\) [3], while the camber value is 1.5\(^\circ\) or less [4] [7]. In combination with castor angle, this explains why the front wheels of a parked car sometimes appear at an odd angle. Another consequence of pivot axis inclination is that each front axle stub pivots through an arc that is no longer lies within a plane parallel to the ground. When the driver turns the handwheel towards full lock, each wheel descends relative to the wheel arch (figure 11). In effect, the driver is jacking up the car [12].
Figure 10
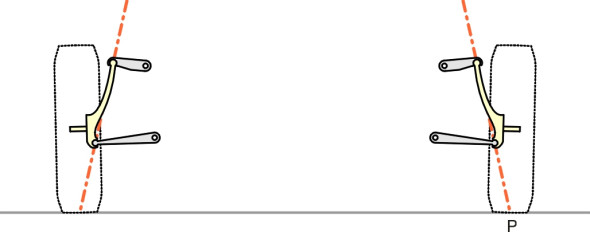
Figure 11
More on offset
It is now time to return to the question of why we need camber or pivot axis inclination at all. They are really different ways of adjusting offset. Imagine the pivot axis extended until it meets the ground at point P as shown for the left-hand front wheel in figure 10. Offset is the lateral distance measured between P and the centre of the contact patch. In principle P could be located inboard of the contact centre (positive offset), or outboard of the contact centre (negative offset) or exactly at the contact centre (zero offset).
Zero offset, sometimes referred to as ‘centre point steering’, means that the steering doesn’t react when the wheel hits a bump or pothole. However, it makes things difficult for the driver when the car is stationary. To manoeuvre in or out of a parking space, the driver must pull hard on the handwheel because when a front wheel swivels about its pivot axis, the contact patch is forced to rotate around its centre, scrubbing the road surface (figure 12). By contrast, an offset equal to (say) 25% of the width of the contact patch will allow the tyre to roll around a small arc when the handwheel is turned, even when the car is at rest.
Figure 12

Figure 13

A negative offset achieves the same goal, with the added advantage that it improves stability under braking. First, let’s see what happens when the offset is positive. If one of the front wheels, the left-hand wheel say, loses grip on a slippery patch (or if the brake on that wheel fails) the imbalance in the resultant braking force tends to make the whole steering system swivel to the right. The resulting cornering force together with the unbalanced braking force on the right-hand front wheel tends to rotate the car bodily so that it veers to the right (figure 13). By contrast, with a negative offset, the wheels swivel in the opposite direction. The cornering force is reversed, and together with the unbalanced braking force, it produces a resultant force that passes roughly through the vehicle’s centre of mass. The resultant now exerts a relatively small torque about the centre of mass, and the car is more likely to remain on its original path (figure 14).
Figure 14
Conclusion
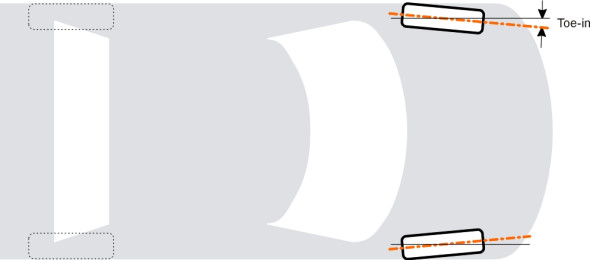
As if all this were not enough, when the front wheels of a car are set in the ‘straight ahead’ position, the wheels don’t actually point fore and aft (figure 15). Usually for a rear-wheel drive model, they are adjusted with a small toe-in (typically less than one degree). The reason is that when the suspension is configured with a positive offset, the front wheels encounter rolling resistance, which drags them backwards relative to the car body: they swivel outwards, which tends to wear out the tyres. For rear-wheel drive cars, toe-in is a cheap and simple way of compensating for suspension slack, and it has the further merit of helping to damp down shimmy [2]. On front-wheel drive cars, the effect is reversed. Under power, the front wheels drag the car behind them, and therefore swivel inwards. This may be compensated by a small toe-out.
Figure 15
To summarise, when you buy a car don’t expect the front wheels to be upright; neither will they point exactly fore-and-aft even with the steering in its central position. Each wheel swivels round an axis that is not vertical either when viewed from the front or when viewed from the side; nor does it pass through the centre of the contact patch. Rather like the rigging of a nineteenth century sailing ship, front wheel suspension has evolved over many years through a process of trial-and-error. The resulting set-up has become traditional workshop practice throughout the motor industry, and although some aspects have been made obsolete by developments in tyre manufacturing, the others have helped to make cars driveable at motorway speeds.